About Me
I am a Machine Learning engineer based in Switzerland. I’m interested in Computer Vision, Robotics Perception, and building real-time software systems.
I am an active member of Swiss organisations that support reason, science and freethought.
Projects
Tool use in Search AI mode
Building infrastructure to benchmark tool use capabilities of Gemini, primarily for Google Search AI Mode.

routine tracking mobile app
A minimal iOS app for tracking routines and good habits. Synchronizes shared routines across devices.

Product recognition in retail stores
Tech lead of product recognition team building ShelfView at Scandit. Custom models running in cloud-based application.

Object localization on mobile
Lead ML engineer for detection of barcodes and text on edge devices at Scandit. Inference with custom models for 4K 50Hz.
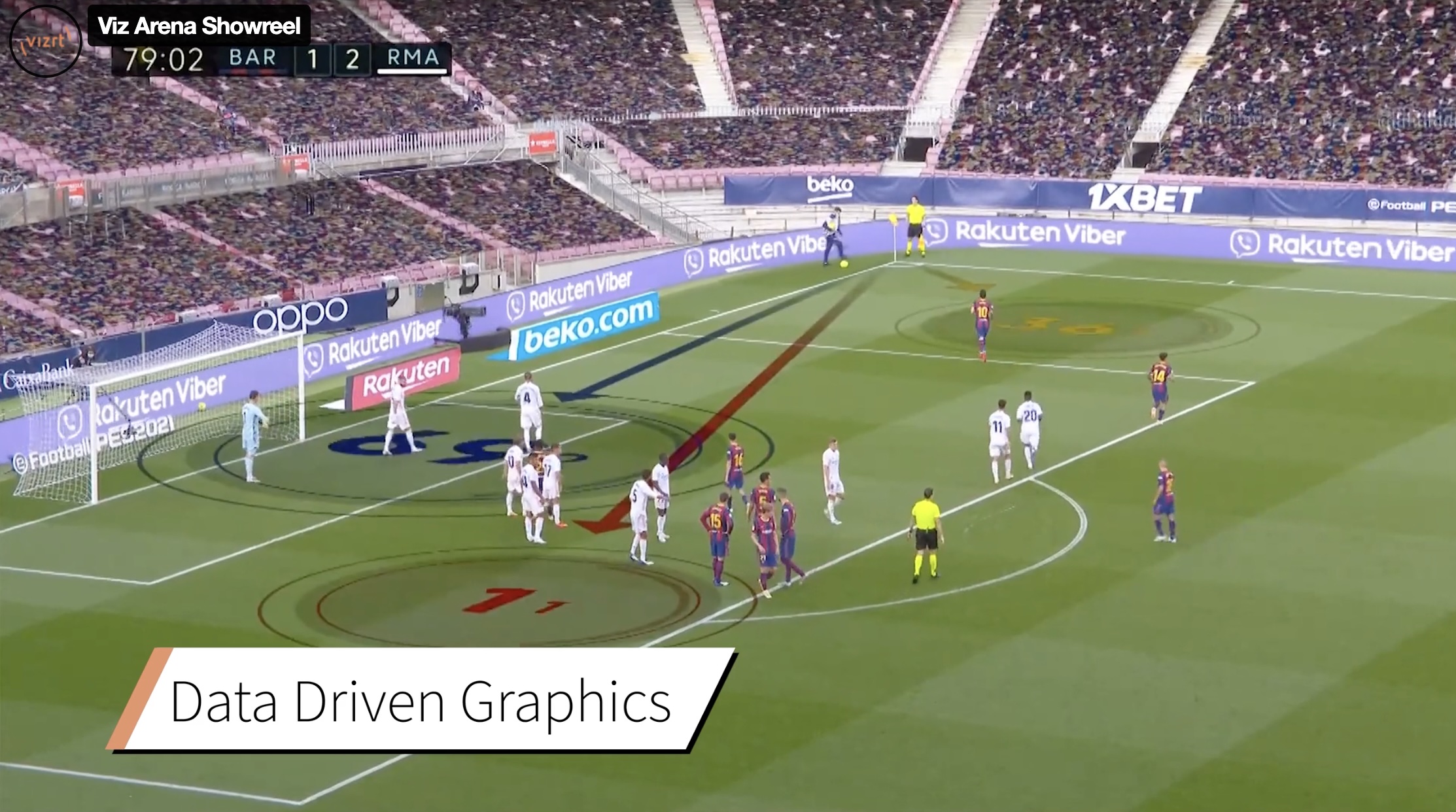
Virtual ads for live sports broadcasting
Custom image segmentation models for real-time AR applications at Vizrt.
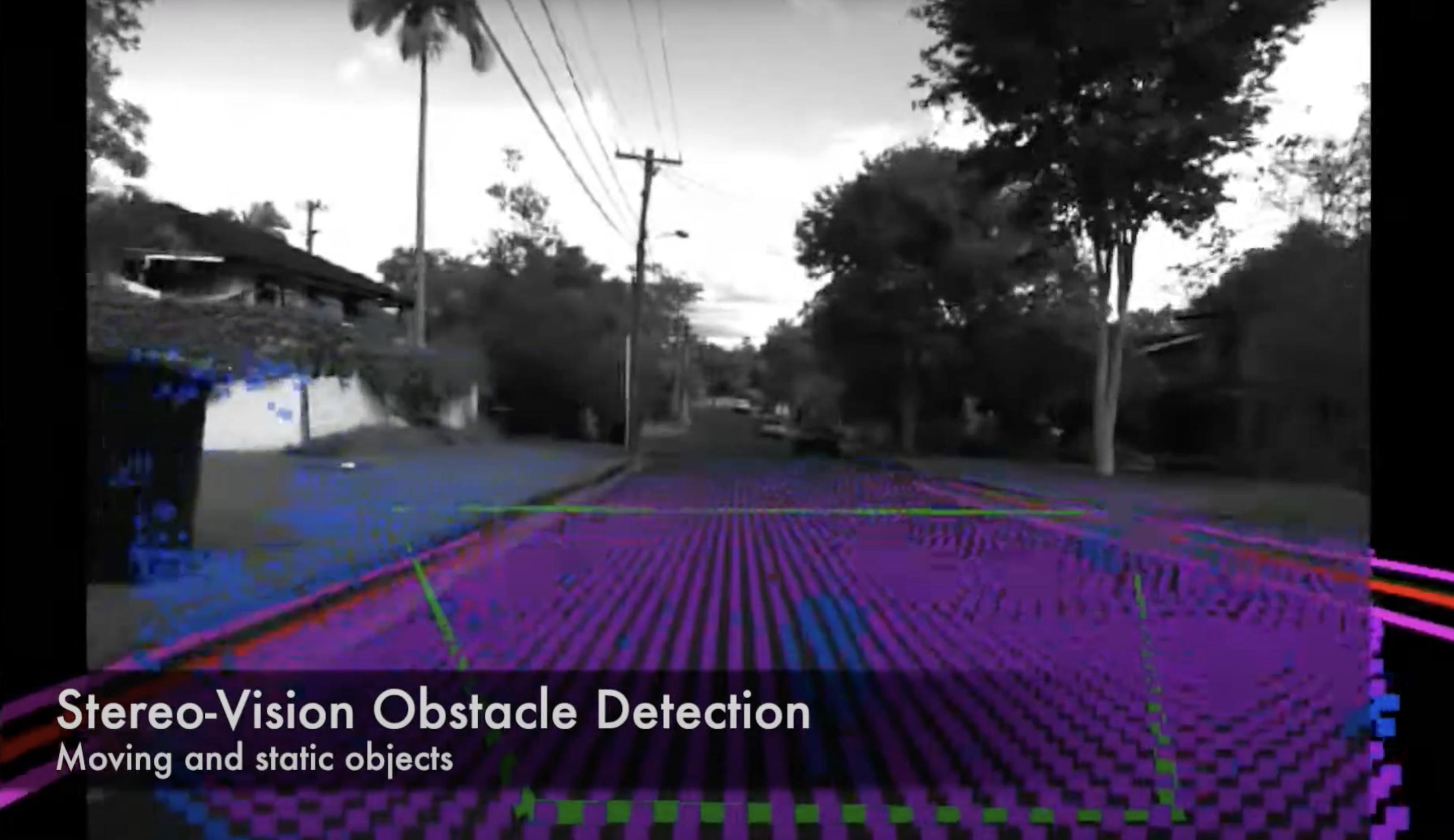
Autonomous driving
Research on obstacle avoidance for autonomous offroad driving at CSIRO Australia. Wheeled robot with stereo vision and Lidar.
Professional Experience
Machine Learning Engineer | Google (Zürich, Switzerland) | 10.2025 - Present
- Working in Google Search on improving AI Mode
- Built benchmarking application to track direct tool call quality of LLMs
Senior Machine Learning Engineer | Scandit (Zürich, Switzerland) | 08.2021 - 01.2025
- Tech Lead and Python Guild Lead for 40+ engineers
- Built large-scale object detection and classification pipelines, validated with US retailer testset
- Led visual search product development, scaled to >1M images/day with 10 customer pilots
- Increased end-to-end accuracy from 40% to 90% within 18 months
- Grew project squad from 2 to 7 engineers with mentoring and technical leadership
Machine Learning Engineer | Scandit (Zürich, Switzerland) | 10.2019 - 07.2021
- Launched real-time ML model for image segmentation running on 1M+ mobile devices monthly
- Trained binary neural networks for smartphones with 30x less memory usage
- Developed multi-stage training algorithms reducing model size by 50% at same quality
- Introduced Python coding guidelines and company-wide Request for Change process
Computer Vision Engineer | Vizrt (Zürich, Switzerland) | 10.2016 - 09.2019
- Developed real-time virtual advertisement overlay system for sports broadcasting
- Deployed neural networks for video segmentation in live TV with 50ms inference on 4K
- Automated training and fine-tuning of networks for customer-specific deployments
Robotics Research Intern | CSIRO (Brisbane, Australia) | 09.2013 - 08.2014
- Autonomous navigation research for large vehicles on industrial sites using stereo cameras
- Designed vision and LIDAR sensor fusion algorithms for obstacle avoidance
Interests
I am a supporter of organisations that promote humanist ethics, reason and science.
Namely, the Forum for Critical Thinking and the Freethinkers Association. In the former, I served as Chairmain for seven years.
I have been a scuba diver for over a decade. My first dive was in 2013 in Brisbane, Australia. Since then, I have done over 150 dives around the world. Some of my favourite spots are