Autonomous Wheeled Robot on Cluttered Grounds
Overview
During my research internship at CSIRO (Commonwealth Scientific and Industrial Research Organisation) in Brisbane, Australia, I conducted cutting-edge research on autonomous navigation for large vehicles operating in complex, unstructured environments.
Research Focus
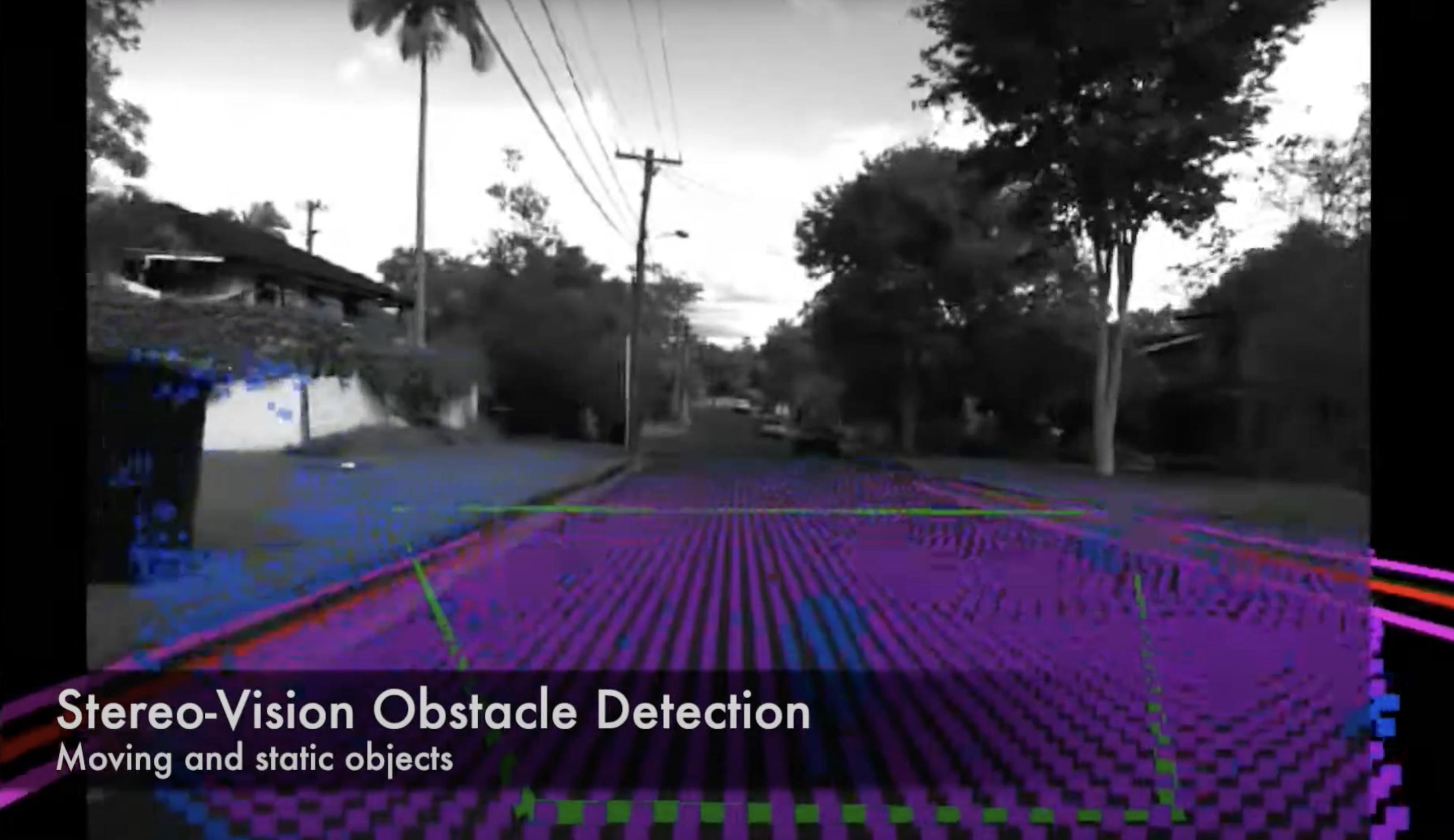
- Autonomous navigation research for large vehicles on industrial sites using stereo cameras
- Designed vision and LIDAR sensor fusion algorithms for robust obstacle avoidance
- Developed ground detection algorithms for distinguishing navigable terrain from obstacles
- Published research on clear path detection in vehicle navigation (ICRA 2015)
Technical Stack
- C++ - Real-time robotics software development
- OpenCV - Computer vision and image processing
- ROS - Robot Operating System for sensor integration and control
Research Innovation
The project focused on enabling autonomous vehicles to navigate safely through cluttered industrial environments by combining stereo vision and LIDAR data. This required developing novel algorithms for real-time terrain classification and obstacle detection in challenging outdoor conditions.
Key Contributions
My research contributed to advancing the state-of-the-art in autonomous vehicle navigation, particularly in the challenging domain of off-road and industrial site navigation where traditional road-based assumptions don’t apply.
Publication
The research resulted in a peer-reviewed publication at ICRA 2015, one of the premier conferences in robotics and automation, demonstrating the scientific rigor and impact of the work.